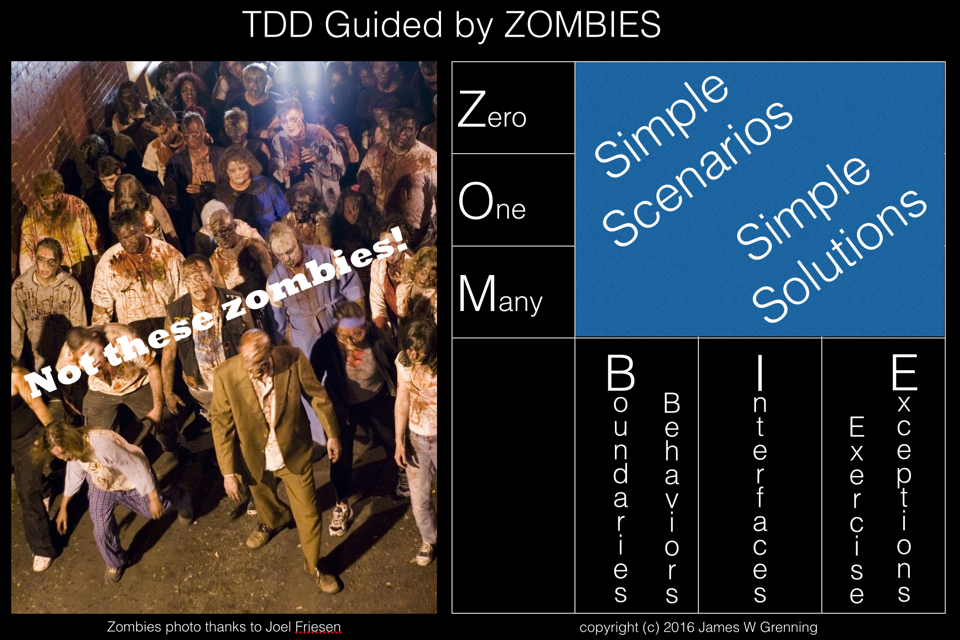
When I first used TDD I read James Grenning’s book Test Driven Development for Embedded C. In this book James proposed following a pattern for developing tests to test for zero, then one and then many (ZOM). Recently he has developed this idea further into ZOMBIE testing. Z – Zero O – One M – Many...